
KYNEA — chainable, shape-shifting robots (private research project)
Originally started as a university project and since then developed independently.
KYNEA is a private research project exploring modular robots that can physically dock with each other and, as a result, change their shape and function. Instead of building a single “perfect” robot, I’m developing a system of simple, repeatable modules that can be connected into different structures—from a stable cube form with wheels to a chain/snake or a ring/clamshell configuration.
At its core is an architectural question that many systems ask too late: how do you design adaptability without letting it tip into complexity?
KYNEA uses real prototypes as a test bed: docking, power paths, the data bus, coupling, and fault tolerance aren’t discussed only in theory—they’re tested iteratively.
Guiding idea: form isn’t a shell—form is capability.
When a system can change its morphology, new possibilities emerge: reach instead of compactness, stability instead of flexibility—depending on the situation. In KYNEA, shape-shifting isn’t a gimmick; it’s a way to switch capabilities contextually.
Core principles
Chaining as the core function: Each module is self-contained, yet also part of a larger whole.
Standardised interfaces: Mechanics, power, and data are defined so docking remains fast, repeatable, and robust.
A deliberate modular vs. integral trade-off: Modularity enables reconfiguration; integration delivers stability and efficiency—both are combined intentionally.
Observability: States and transitions should be visible/measurable (system behaviour, not gut feeling).
Iterative prototyping: Each generation tests a clear hypothesis (docking, kinematics, coordination, robustness).

KYNEA — Prototype 1 (paper functional prototype): An early, working paper prototype with integrated servos, built to validate segment geometry and joint angles. The images show different poses/form states and serve as a proof of feasibility for controlled shape change before the housing and interfaces were transferred into 3D-printed modules.
Form vocabulary (Gen 1)
KYNEA deliberately starts with three base forms—an “alphabet” from which future variants can evolve:
CUBE (Drive Mode)
A stable, drivable base form—robust, controllable, and practical for everyday use.
CHAIN / SNAKE (Traverse Mode)
Reach and mobility—for tight spaces, navigating around obstacles, and reshaping in the environment.
RING / CLAMP (Tool Mode)
Clamping, gripping, stabilising—structure turns into a tool.

KYNEA — university prototype (modular morphology): This earlier prototype shows a segmented, shape-changing system that can be assembled from identical modules into different configurations—including a compact “cube” form, a ring structure, and an extended chain. It served as a proof of feasibility for reconfiguration through standardised segment geometry and docking points.
Demos
Demo 1 — Cube ↔ Snake ↔ Cube
Drive as a cube → reshape into a chain to handle a tight space/obstacle → return to cube and continue driving.
Demo 2 — Swarm to tool
Multiple modules dock → form a chain → become a ring/clamp around an object (or act as a stabilising structure).
Demo 3 — Robustness under failure
One module fails → the system reorganises → functionality remains available (e.g., drive mode is still possible).
The robot’s striking shape changes create compelling visual effects and unusual movement patterns. This is made possible by a key design feature: the rotation axis is offset by 45° within the plane, so the segments don’t just rotate—they also shift sideways during reconfiguration. As a result, the robot can switch from a compact configuration to an open state within seconds.
This fast morphing transition isn’t only aesthetic; it’s functional. With every change of form, the system’s capabilities change as well—for example, enabling different locomotion modes, ranges of reach, or stability behaviours.
Why KYNEA is compelling
KYNEA is a real-world test bed for system dynamics in hardware: every additional module increases capabilities—but also coupling. That’s where architectural quality is decided. The project makes it visible how interfaces, feedback loops, delays, and fault management behave in a growing system—and how to design systems that remain capable of learning and evolving.
Status & next steps
KYNEA is currently building its first stable generation: the docking mechanism, base modules, and the three core forms are being developed and tested iteratively. Next steps include stabilising the coupling (mechanics/power/data), choreographing the shape transitions, and defining a clear state logic for coordination and debugging.

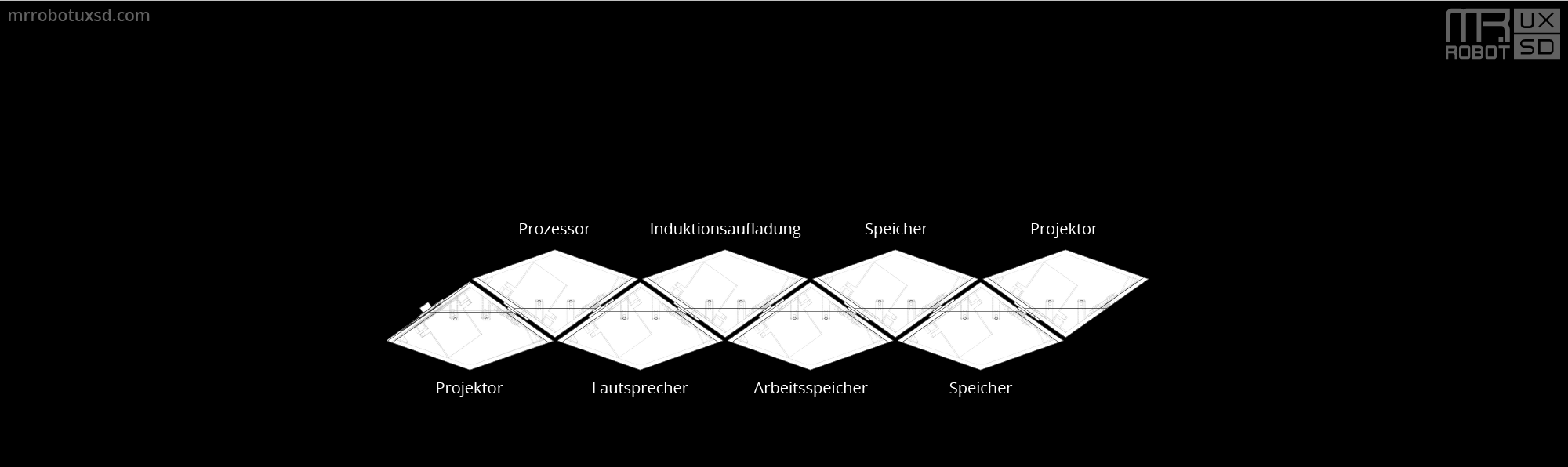
KYNEA — Prototype 2 (segment chain): The second prototype shows a linked series of 3D-printed segment modules with integrated servo drives and visible wiring. The chain serves as a test platform for joint geometry, range of motion, and modular coupling, with the goal of making stable shape transitions (e.g., chain ↔ compact configuration) reproducible.