
The Tank
Autonomous agents in a digital ecosystem — private research project
The Tank is a privately initiated research project focused on building a digital ecosystem in which autonomous agents (“digital microbes”) must survive in a simulated environment. In a virtual “pond”, two species—predators and prey—coexist and develop strategies over time for foraging, escaping, and interacting.
To make the rules as realistic as possible, I translate insights from scientific literature (ecosystems, behaviour, perception, heredity) into a controllable simulation. The project is intentionally interdisciplinary: biology, physics, swarm behaviour, AI, and visual design come together with the goal of making learning and system dynamics visible.
Agent architecture (perception → decision → action)
Each agent has nine input channels to sense its environment:
3 feeding inputs (energy / mass / toxins)
2 visual inputs (“eyes”) to identify food, friend, and foe
4 kinaesthetic touch points for tactile stimuli and contact feedback
Movement is generated via fins/actuators controlled by the outputs of a neural network. The network consists of an input layer, a hidden layer, and an output layer, forming the foundation for learning and decision-making.
Learning principle: behaviour is not pre-programmed
Behaviour isn’t scripted; it emerges through feedback. When an agent randomly performs a successful action (e.g., finds food), the activated networks are reinforced and become more likely to be repeated. At the same time, partial networks (vision/feeding/touch) compete for control—creating individual “brain patterns” and emergent, hard-to-predict strategies.
The graphic shows two species in The Tank ecosystem: predators (red) and prey (blue), each with different physiological strengths (agility vs. speed). The designs emphasise observability: the agents’ “inner life”—especially the neural network—is made visually legible. In the animated version, incoming input leaves a light-impulse trace through the network, so learning becomes observable as a dynamic process. Key parameters such as lifespan, energy level, and biomass are directly readable in the visualisation, enabling real-time analysis of the agents’ state and development.
Systems-theory lens: observability as a design goal
A central goal of The Tank is observability: internal states shouldn’t remain hidden, but become readable in the interface—such as lifespan, energy level, biomass, and the activity and development of the neural network. Learning processes are made traceable through visual traces/impulses within the network.
This turns the simulation into a “visible system”: you can test how rules, environmental conditions, and sensing create feedback loops—and how stability, collapse, adaptation, or swarm patterns emerge from them.
Status & next steps
Originally started as a theoretical design concept, The Tank now serves as a foundation for functional prototypes built with animated programming. Next steps include expanding the environment logic, stabilising the learning feedback loop, and refining the UI so system states and strategy shifts remain analysable in real time.
The autonomous agent (the digital organism)
Each autonomous agent has nine input points that allow it to perceive its environment precisely and respond accordingly:
Three feeding inputs: to distinguish between energy sources, mass, and toxins.
Two eyes: enabling visual perception to recognise enemies, allies, and food.
Four kinaesthetic touch points: capturing tactile stimuli and allowing the agent to sense physical interactions with the environment.
For locomotion, the agent uses fins driven by the outputs of its neural network. The neural network consists of an input layer, a hidden layer, and an output layer, which together form the foundation for learning and decision-making.
The agent’s behaviour is not pre-programmed; it is driven by a learning system that continuously responds to feedback. When an agent randomly consumes food, the activated neural networks reinforce those successful actions and try to repeat them. The system is designed to amplify positive outcomes and minimise negative ones, gradually developing strategies for foraging, escape, and other survival-critical behaviours.
Different networks for vision, feeding, and touch compete within the overall system. Depending on the input, the network settles into a particular behavioural pattern, producing unique “brain patterns” in each individual and generating autonomous, unpredictable behaviour.
This system simulates not only survival in a virtual environment, but also the development of individual behaviours shaped by interaction with the environment. The emergent strategies and unpredictable behaviour patterns make the project a compelling exploration of how AI can be used to simulate biological processes.
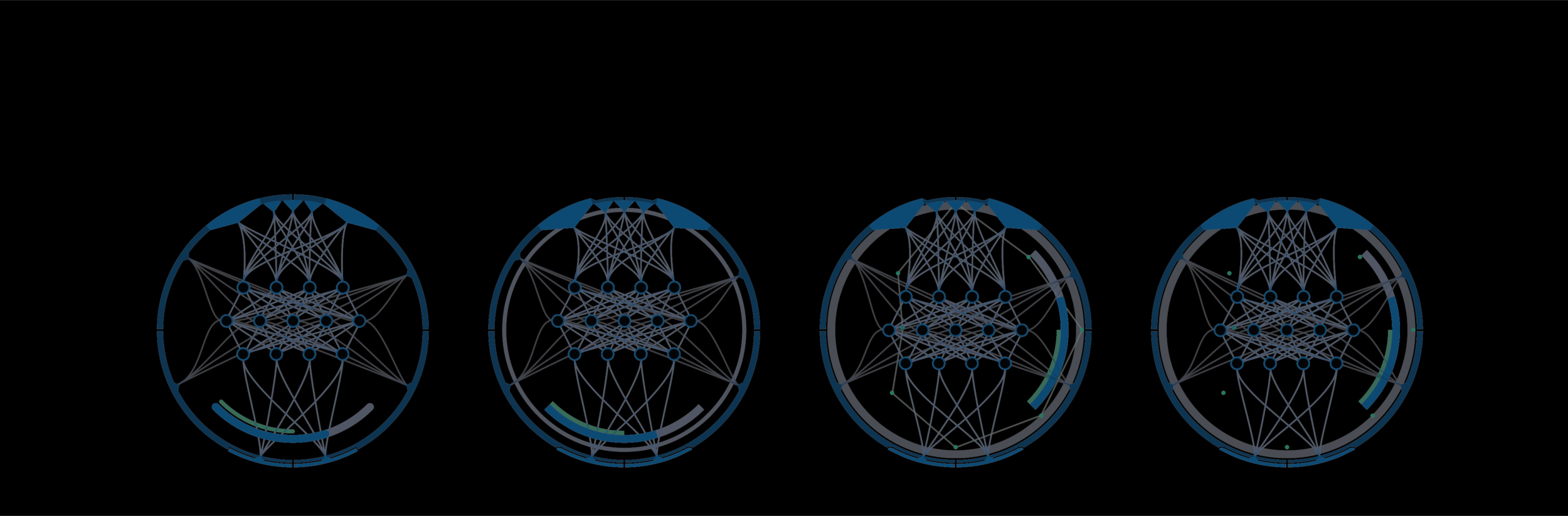
The Tank — detailed architectures: The graphic compares several variants of the UI and agent architecture: different ring layouts, layering structures, and network arrangements for the same agent. This allows presentation logic, information density, and readability to be tested systematically—from compact status rings to detailed “inner life” views with neural activity.
The Tank — locomotion types: The graphic shows multiple variants of agent physiology and locomotion—from “swimmers” with different fin/actuator configurations to more compact body forms. This makes it possible to compare agility, stability, and energy efficiency, and to vary them systematically as design parameters within the simulation.
The Tank — simulation space: The scene shows the virtual “tank” as an environment with large polygonal obstacles/no-go zones (red), as well as distributed objects representing resources and stimuli. Multiple agents move through the space and interact with the environment; their positions and encounters make it visible how behaviour, navigation, and survival emerge from simple rules and learning processes.
The Tank — UI/simulation scene: The graphic shows a running ecosystem simulation with one agent in focus. At the centre is the creature’s visualised neural network (“inner life”), surrounded by UI overlays for speed over time and key state/control parameters. Geometric elements in the space mark environmental influences and obstacles, while the visualisation makes the agent’s learning, activity, and behaviour observable in real time.