
A08|02 Der einfache Neigungssensor
Digital Tilt Sensor
Sensorwerte / Magnetsensoren
Mit einem Neigungssensor oder Tiltsensor genannt, können Neigung, Bewegung und Ausrichtung des Sensors (oben/unten) gemessen werden. Bei cleverem Einsatz können auch Erschütterungen detektiert werden. Der robuste und kompakte Aufbau macht sie für Spielzeuge, Gadgets und Geräte beliebt. Außerdem sind sie klein, preiswert, stromsparend und einfach zu bedienen. Bei richtiger Anwendung nutzen sie sich nicht ab.
Spezifikationen
- Working voltage: 3.3-5v
- Signalart: Digital
- Pinabstand: 2.54mm
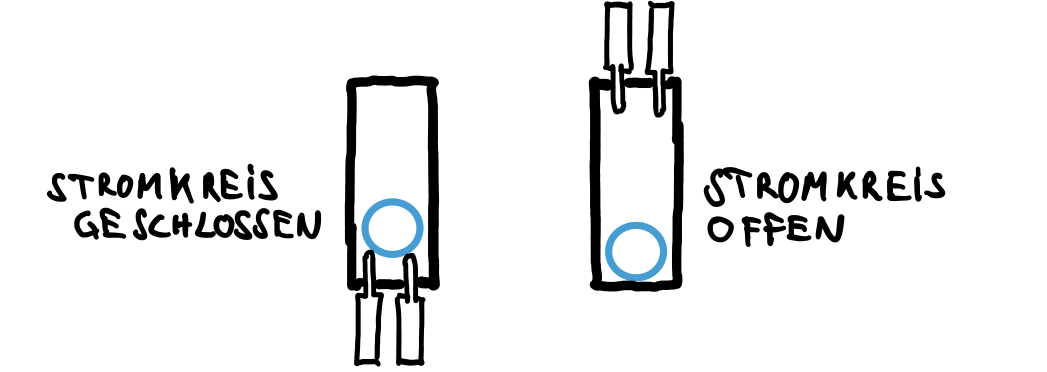
Mechanische Tilt-Sensoren bestehen meist aus einem Zylinder, einer frei rollenden Metallkugel im Inneren und zwei Anschlüssen am Zylinderboden. In vertikaler Lage des Zylinders verbindet die Kugel beide Anschlüsse und schließt den Stromkontakt. Wird der Sensor gedreht oder erschüttert löst sich der Kontakt zwischen den beiden Anschlüssen und der Strom ist unterbrochen.
Durch diesen mechanischen Aufbau haben sie den Vorteil, dass sie etwas höhere Ströme schalten können und dafür keine zusätzliche Elektronik benötigen.
Der Aufbau
Verbinde dein Arduino mithilfe der Jumper Wire mit dem Modul:

Der minimal Sketch
Der Test-Sketch für den Neigungssensor ist denkbar einfach. Folgender Sketch liest den Zustand des Sensors und lässt entsprechend eine LED ein- oder ausschalten. Dieser Sketch ist in seinem Aufbau identisch mit dem Code aus dem Kapitel für den digitalen Momentanschalter - bis auf die Variablennamen. Siehe für nähere Erläuterungen des Sketches in A07|01 Der digitale Momentanschalter nach. Kopiere den unteren Sketch, füge ihn in die Arduino IDE ein und lade ihn auf das Arduino-Board rauf.
/********************************************************
A08|02 Der einfache Neigungssensor
Mr Robot UXSD / www.mrrobotuxsd.com
*********************************************************/
int tiltPin = 3; //Pin für den Neigungssensor
int ledPin = 13; //Pin für die LED
void setup()
{
pinMode(ledPin, OUTPUT); //LED-Pin als Ausgang deklarieren
pinMode(tiltPin, INPUT); //Neigungssensor als Eingang deklarieren
}
void loop()
{
//Variable um den Neigungssensor abzufragen
int tiltState = digitalRead(tiltPin);
if (tiltState == HIGH) //Prüfen, ob Neigungssensor ausgelöst wurde
{
//Dieser Teil wird ausgeführt, wenn tiltState HIGH ist
digitalWrite(ledPin, HIGH); //LED einschalten
}
else
{
//Dieser Teil wird ausgeführt, wenn tiltState LOW ist
digitalWrite(ledPin, LOW); //LED ausschalten }
}
}
Falls du die hier beschriebenen Elektronik-Module nicht hast kannst du sie in meiner Einkaufsliste finden. Warum ich selber hauptsächlich mit Modulen der Marke Keyestudio arbeite erläutere ich unter diesem Blog-Artikel.